[VIP第1年] 指数:3
[VIP第1年] 指数:3
硬件开发前期市场调研与需求分析标题:硬件开发前期:深入市场调研与精细需求分析内容概要:在硬件开发的初始阶段,深入的市场调研和精细的需求分析是项目成功的基石。本文详细阐述了如何进行有效的市场调研,包括识别目标市场、竞争对手分析、技术趋势跟踪等。同时,强调了需求分析的重要性,通过用户访谈、问卷调查、竞品对比等方法,收集并整理出详细的需求清单。此外,还讨论了如何将模糊的需求转化为具体的技术规格和功能要求,为后续的硬件设计提供明确的方向。关键点:市场调研的重要性及方法需求分析的具体步骤与技巧如何将需求转化为技术规格竞品分析与差异化策略。 软件和硬件又有明显的区分,至少工作内容区别很大。浙江医疗设备硬件开发价格
影响硬件开发成功率的因素有技术难度:硬件开发需要深厚的技术积累和专业知识,技术难度越大,成功率越低。市场需求:准确把握市场需求并开发出符合市场需求的产品是成功的关键。如果产品无法满足市场需求或市场需求变化迅速,成功率将降低。资金投入:硬件开发通常需要大量的资金投入,包括研发、生产、市场推广等各个环节。资金不足或资金链断裂都可能导致项目失败。团队能力:团队的研发能力、项目管理能力、市场营销能力等都对硬件开发的成功率产生重要影响。市场竞争:市场竞争激烈时,产品需要具有独特的竞争优势才能脱颖而出。否则,很容易被市场淘汰。 山东汽车新能源硬件开发环境硬件开发项目制定前需要考察项目的可持续性。

未来出行,从硬件开始:交通领域的硬件开发革新内容概要:在交通出行领域,硬件开发同样展现出了巨大的潜力和价值。从电动汽车的心脏——电池系统,到自动驾驶汽车的关键——传感器和算法,硬件技术的进步正在重塑我们的出行方式。本文聚焦于交通出行中的硬件开发应用,介绍了电动汽车、自动驾驶汽车、智能交通系统等领域的硬件创新。我们分析了电动汽车电池技术的突破如何延长续航里程、降低使用成本;探讨了自动驾驶汽车如何通过高精度传感器和复杂算法实现安全的自动驾驶;同时,还展望了智能交通系统如何通过物联网、大数据等技术实现交通流的优化和管理。这些硬件技术的创新不仅提升了交通出行的便捷性和安全性,还为城市的可持续发展注入了新的动力。
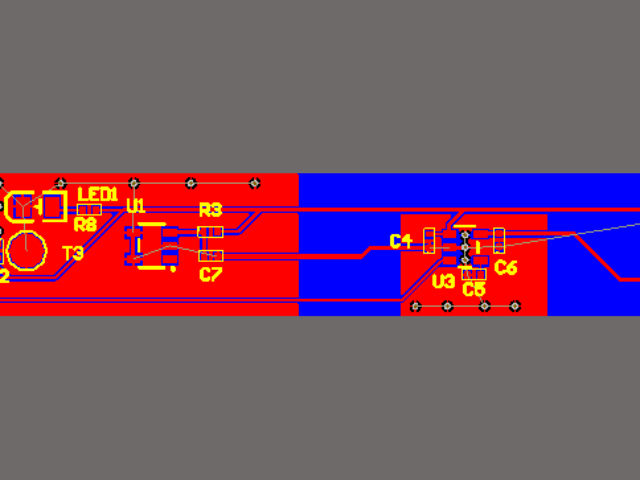
设计PCB时使用蛇形走线(也被称为蛇行、蜿蜒或曲折布线)是出于多种考虑,主要包括以下几个方面:一、信号完整性减少信号反射和串扰:在高速电子设备中,信号完整性至关重要。蛇形走线通过增加信号线的物理长度和改变其形状,有助于减少信号的反射和串扰,二、时延匹配同步信号:对于差分信号或同步信号,时延匹配至关重要。蛇形走线可以更容易地实现时延匹配,确保信号同时到达目的地,从而维持系统的时序准确性。三、电磁兼容性(EMC)减少电磁干扰(EMI):蛇形走线可以减少回流路径的长度,降低电流回流时产生的电磁场,从而减少辐射和敏感信号的干扰。四、空间利用和布局优化填充空白区域:PCB布局中常常存在一些不规则的空白区域,无法容纳直线走线。五、特殊应用代替保险丝提供过载保护:蛇形走线通过特定的设计可以限制通过它的电流,从而起到类似保险丝的保护作用。但这种方法可靠性可能较低,需谨慎使用。 好的硬件开发需要在功能和成本上优化选择。
FPGA(Field-ProgrammableGateArray,现场可编程门阵列)硬件设计是一个复杂但高度灵活的过程,它允许工程师通过编程来配置FPGA芯片以实现特定的数字电路功能。以下是对FPGA硬件设计流程的详细解析:一、FPGA硬件设计流程概述FPGA硬件设计流程主要包括以下几个关键步骤:需求分析、FPGA芯片选择、硬件框图设计、HDL编程、仿真测试、布局布线、配置与调试。二、具体步骤详解需求分析确定FPGA的应用需求,包括功能需求、性能需求、成本预算等。根据需求确定FPGA板卡的尺寸、工作频率、IO口数量、运行环境等设计规格。三、FPGA硬件设计工具在FPGA硬件设计过程中,需要使用一系列工具来辅助完成各个步骤。这些工具通常包括:IDE(集成开发环境):如Xilinx的Vivado和Intel的QuartusPrime,它们集成了代码编辑、综合、仿真和调试等功能,能够提高设计效率。HDL编辑器:用于编写和编辑HDL代码。仿真工具:如ModelSim,用于对HDL代码进行功能仿真和时序仿真。布局布线工具:负责将HDL代码翻译成物理电路图,并进行布局和布线。四、FPGA硬件设计的优势FPGA硬件设计具有以下几个优势:灵活性:FPGA可以通过编程来配置不同的电路功能,具有很高的灵活性。 在硬件开发过程中,需要使用各种工具和技术来辅助完成设计和开发工作。山东汽车新能源硬件开发环境
如何提高硬件开发水平?浙江医疗设备硬件开发价格
手术机器人,医学上常称为“达·芬奇机器人外科手术系统”,是一种替代腹腔镜及胸腔镜的“主仆控制式”内镜显微手术系统。其工作原理融合了多个学科的技术,包括医学、材料学、自动控制学、数字图像处理学、生物力学以及机器人学等,是一个多学科高度集成的综合体。以下是手术机器人工作原理的详细阐述:一、系统组成手术机器人系统主要由以下几部分组成:主机控制系统,传输和支持系统,影像输出系统。二、工作原理精细操控:手术机器人通过其高精度的机械臂和手术器械,实现了对手术操作的精细控制。机械臂模拟了人类手臂的灵活性和精确度,同时过滤了人手本身的震颤,从而提高了手术的稳定性和安全性。实时反馈:传输和支持系统确保了手术过程中信息的实时反馈。 浙江医疗设备硬件开发价格
文章来源地址: http://swfw.chanpin818.com/cysj/dzcpsj/deta_24014913.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。